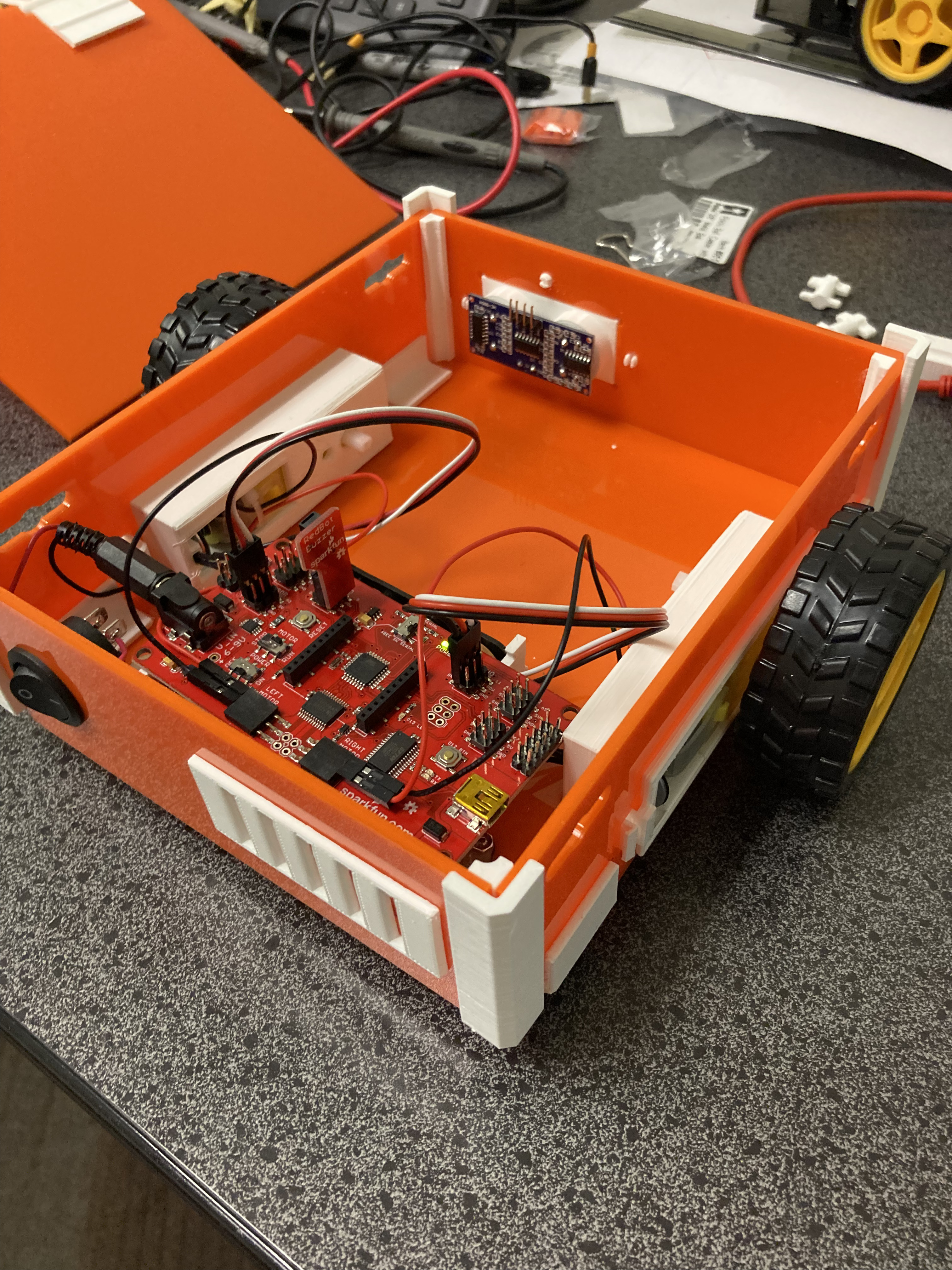
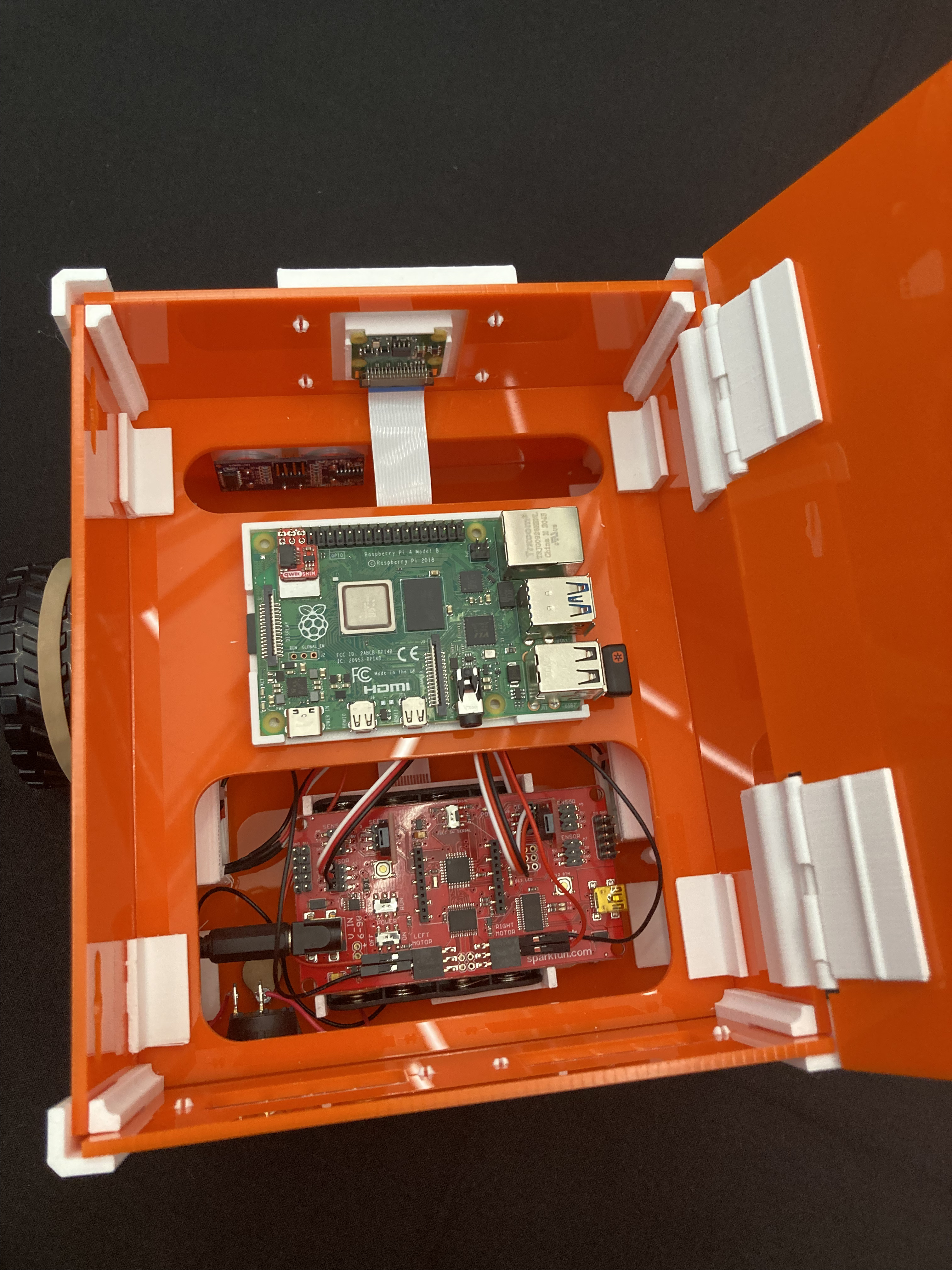
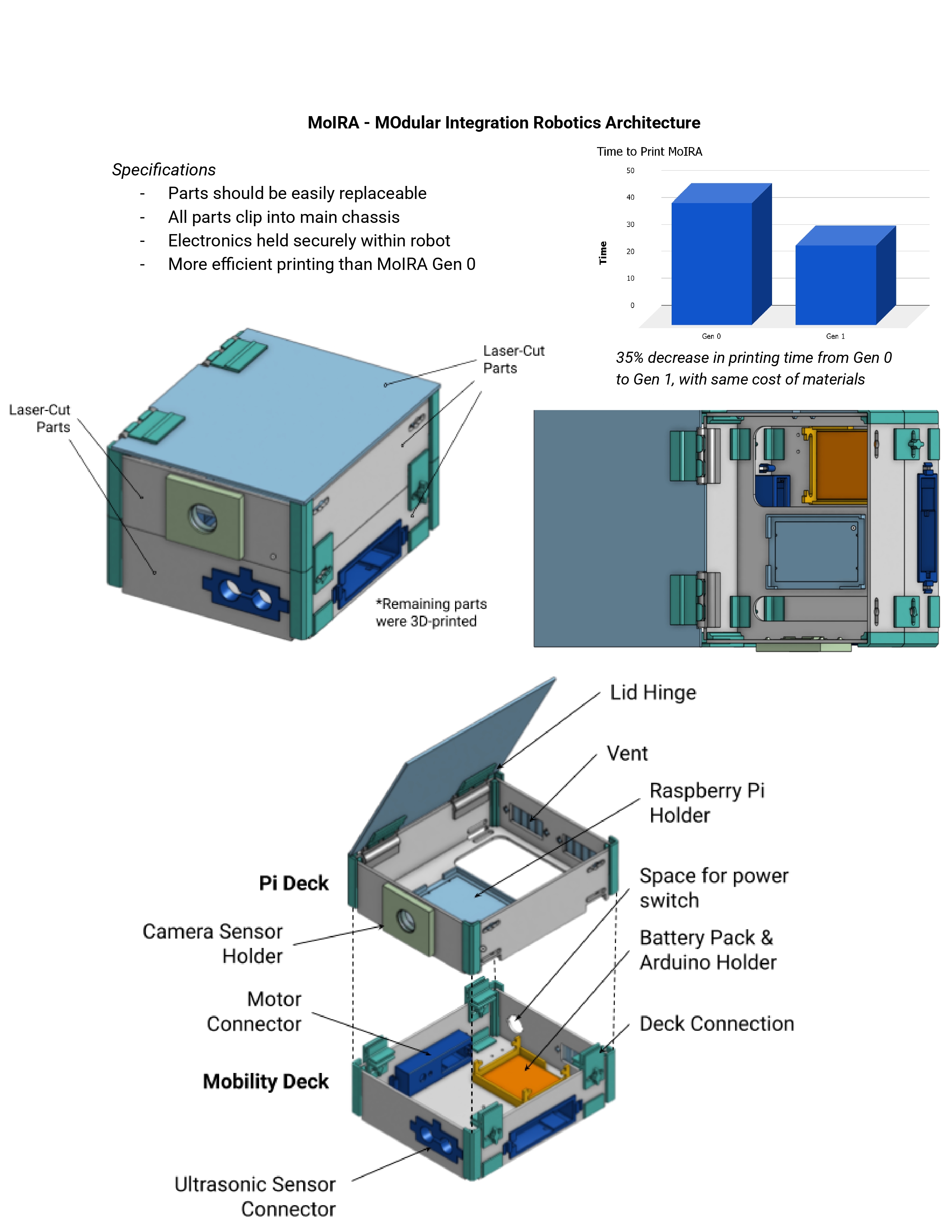
As a robotics intern for Dr. Ada-Rhodes Short at the University of Nebraska Omaha, I designed, built, and programmed a modular robot with interchangeable components using CAD, 3D printing, laser cutting, and Arduino, following Agile development principles. I contributed to the development of MoIRA (MOdular Integration Robotics Architecture) Gen 1, a NASA-sponsored terrain exploration project, optimizing its design to reduce print time by 35%.

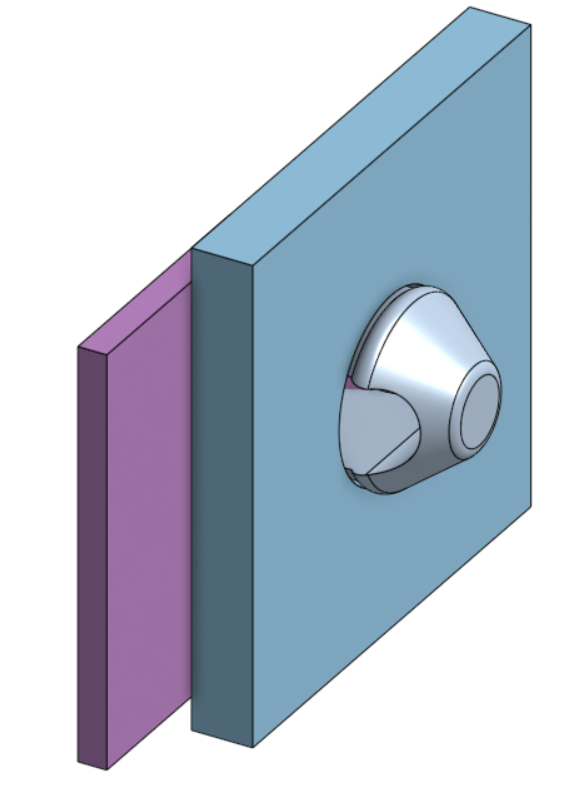
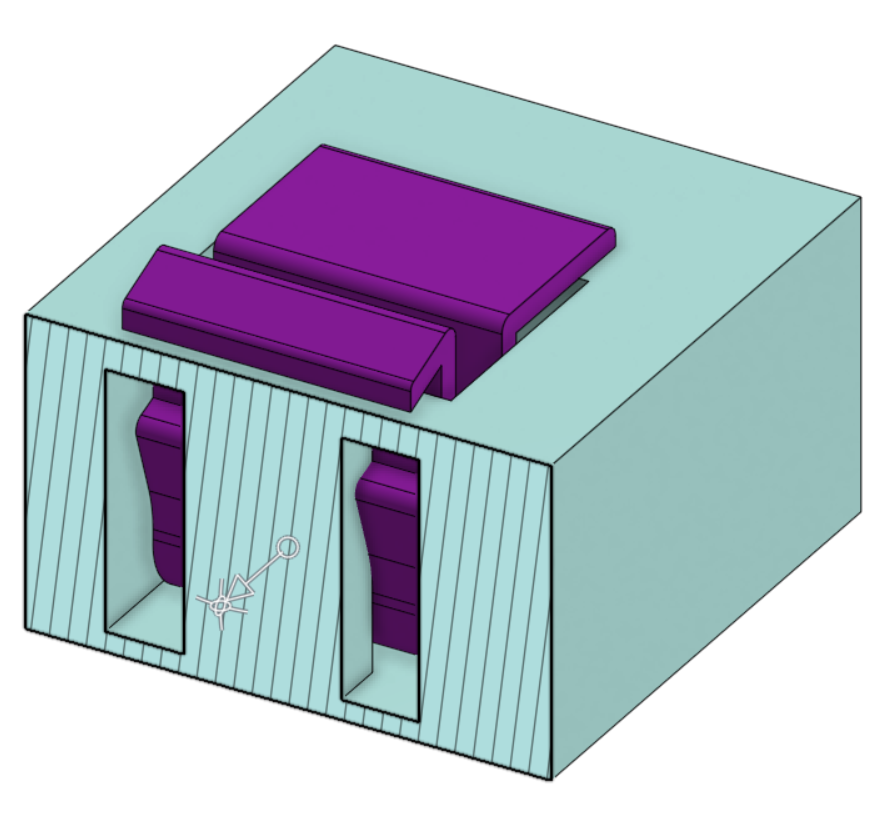
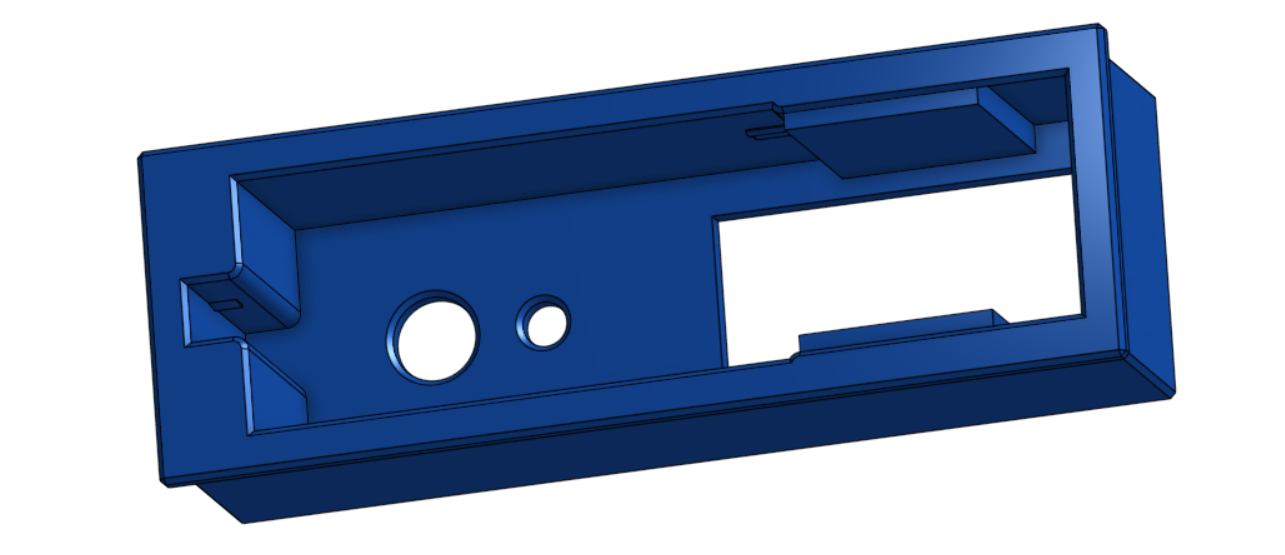
Motor Casing
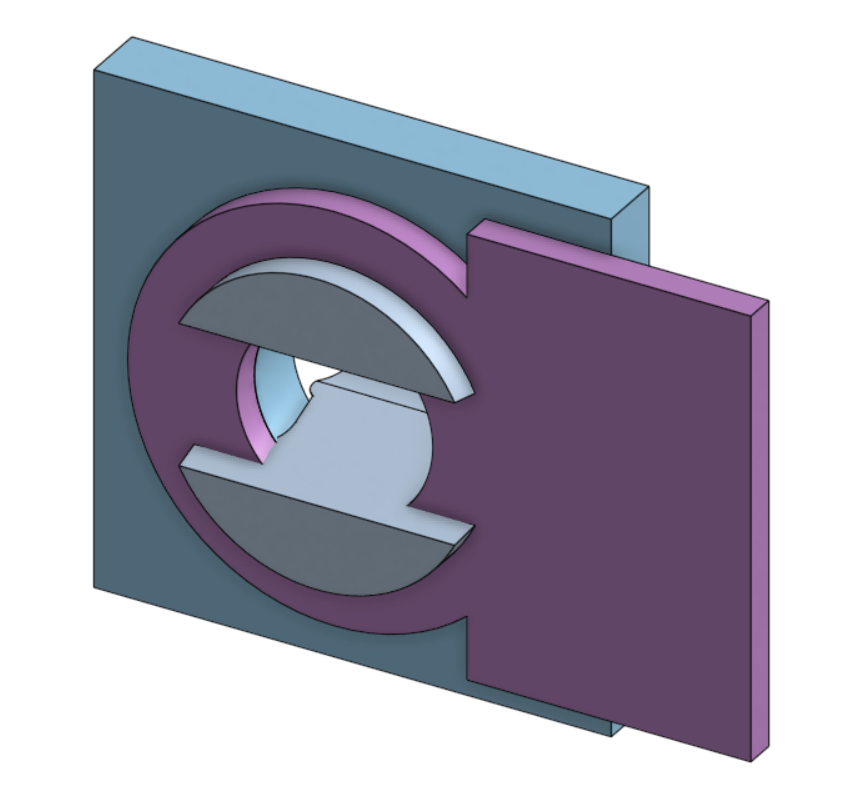
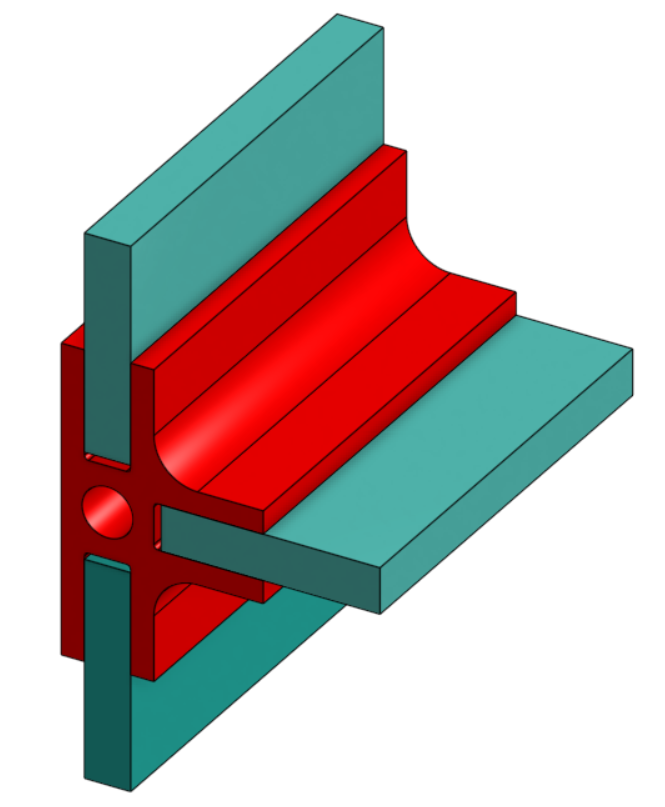
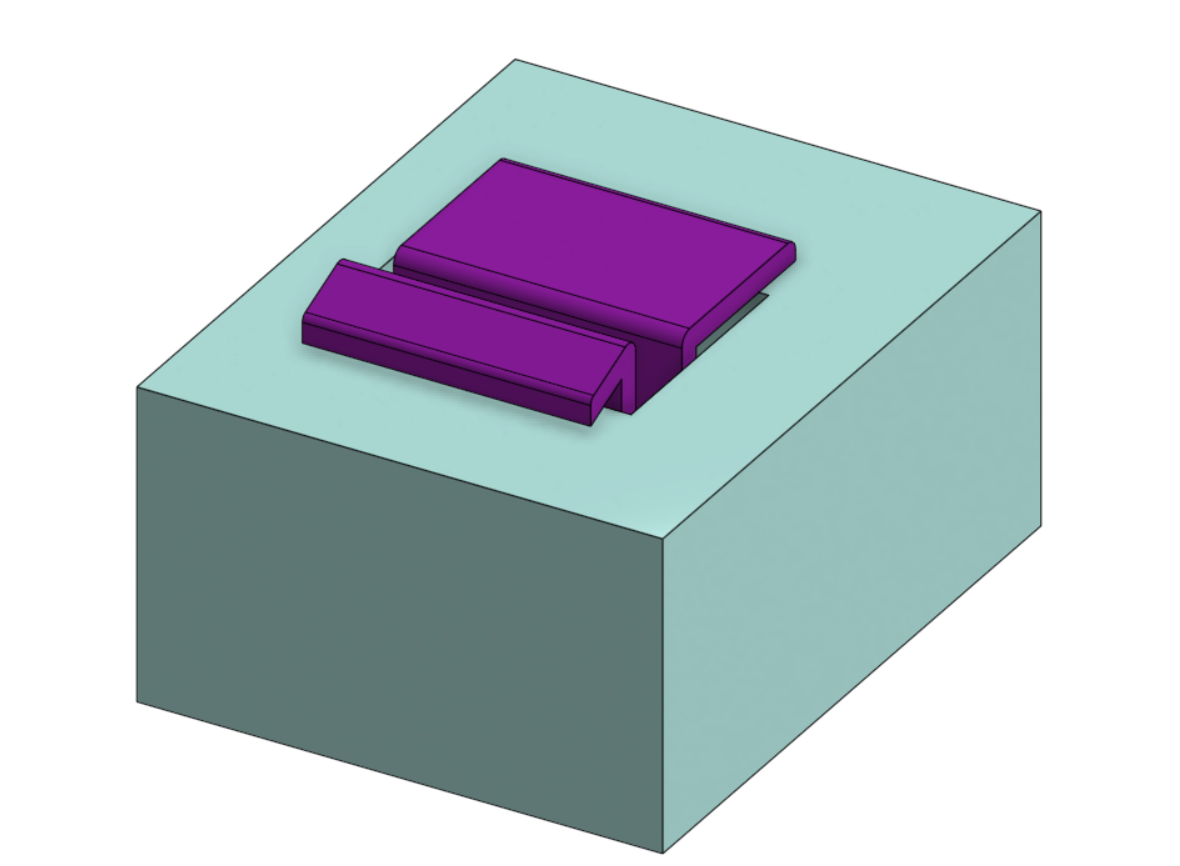
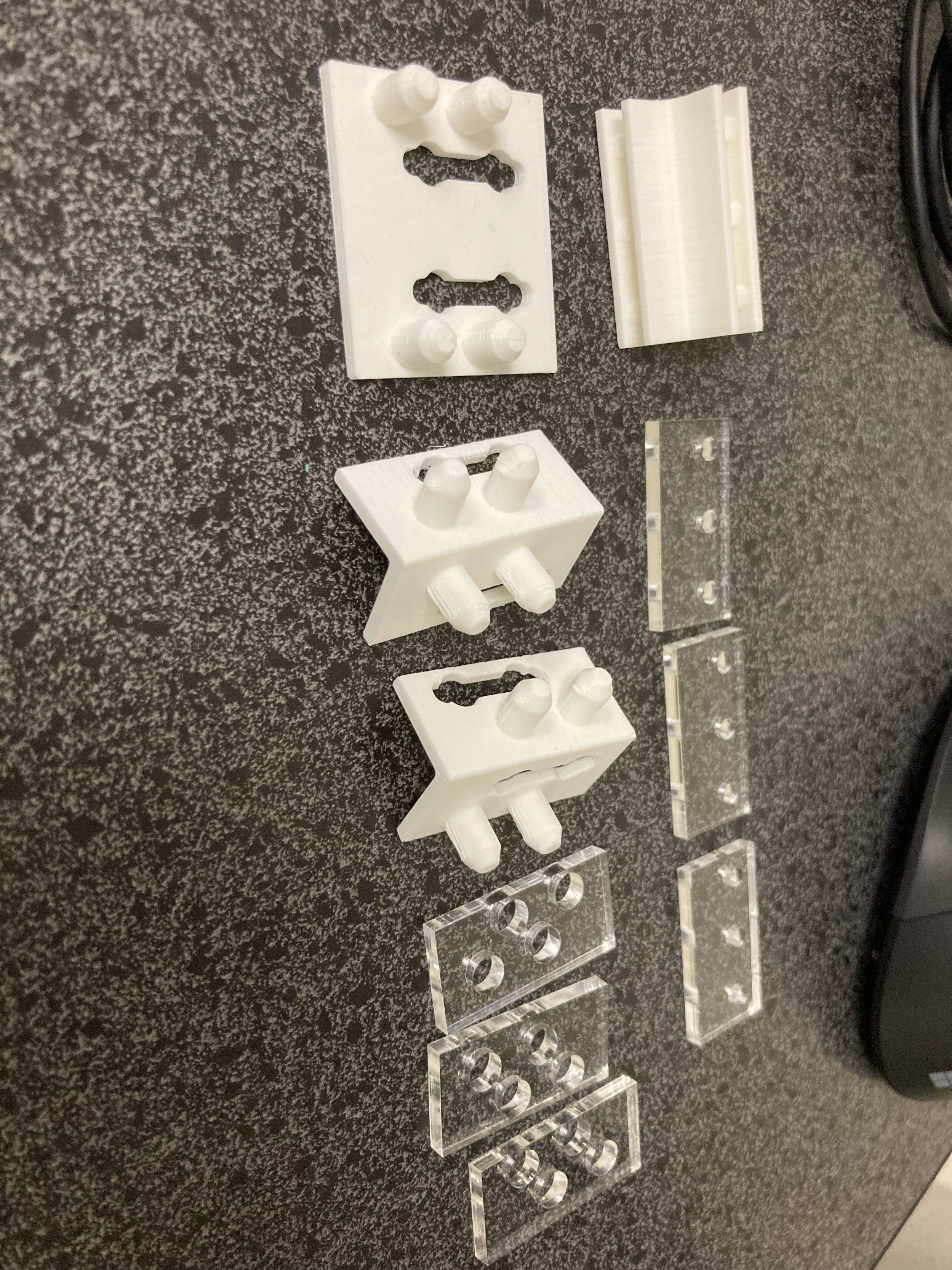
Clip Connection Iterations