Over the summer, I worked on soft vine robot actuation research project with Kentaro Barhydt for the lab of Professor Harry Asada. I implemented a closed-loop control system for a soft vine robot for heavy industry applications. This enhanced actuation precision as I integrated PID controllers and encoders for feedback, which hadn’t yet been done in this application.
I used SolidWorks to CAD the design of the frame that was to hold the vine robot and manufactured it. I then printed the vine robot base and assembled it to be tested.
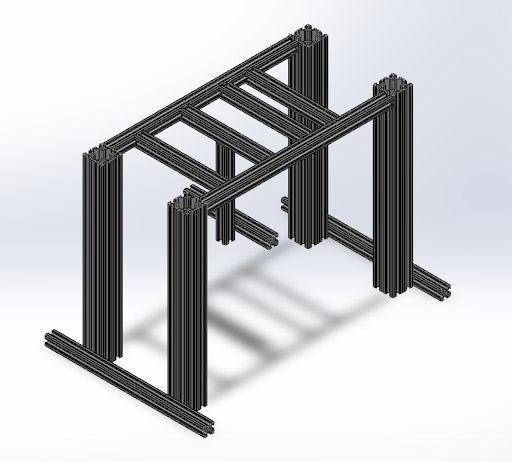
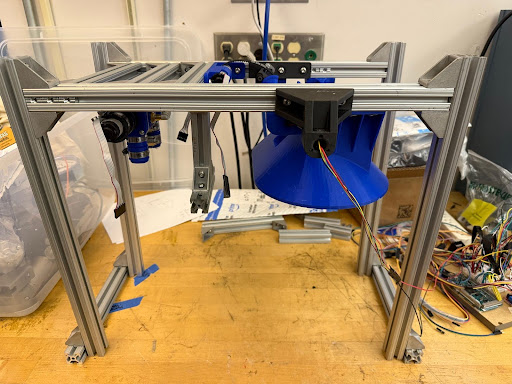
Rig
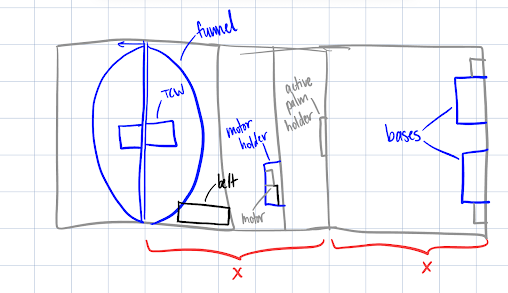
Vine Robot Base

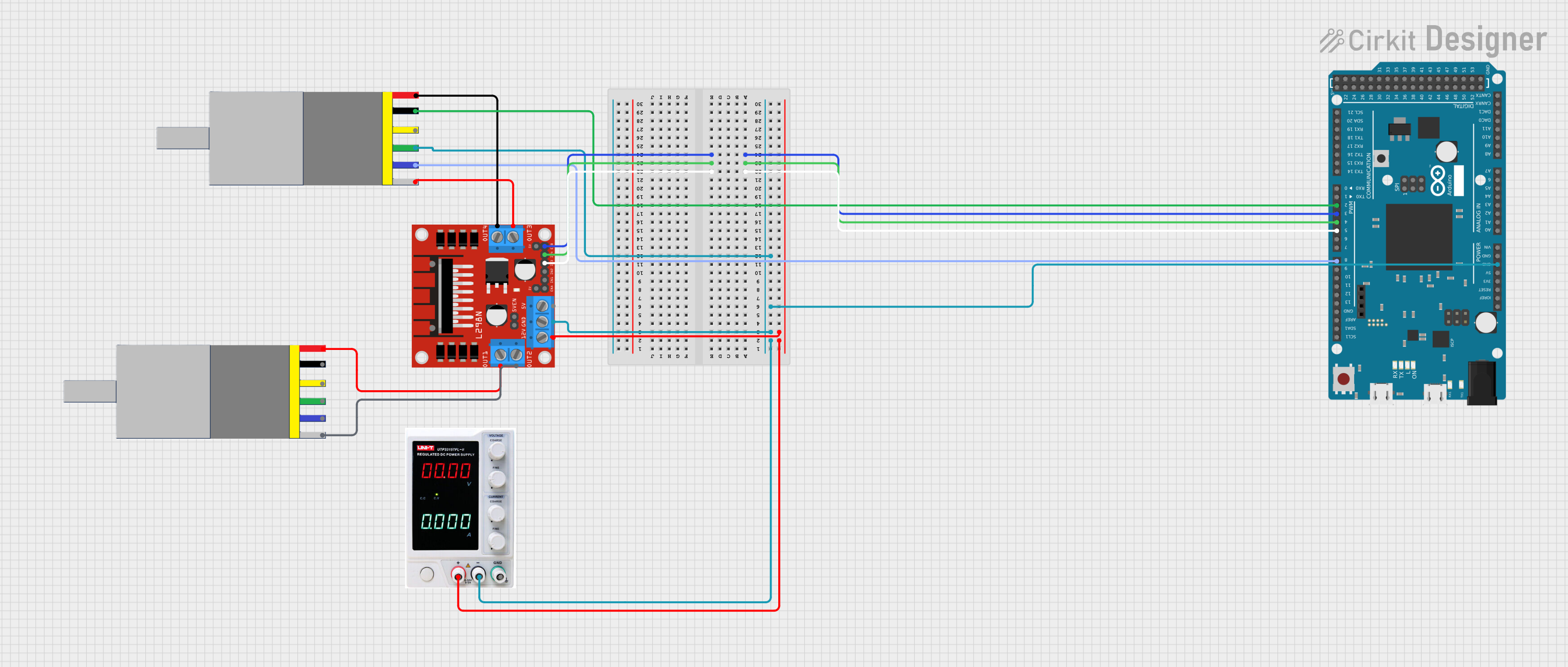
Circuit Diagram